This simple device has one task - it converts received exiles, broadcast in a walrus alphabet, to Latin letters. This translator can find many applications. With it, you can train your morse broadcasting skills, but also decode data received from the ether. It may be amazing, but the walrus alphabet is still very popular in amateur radio, and in the event of a natural disaster or apocalypse, zombies may be the only means of communication over greater distances among the ruins of civilization

.
Walrus alphabet is a method of coding letters of the alphabet in the form of dots (short sounds) and dashes (long sounds). In the system, the duration of the dot is taken as the unit of time measurement and all the times of the individual sounds are calculated according to this time. Initially, this time is set to 1000 ms, which is quite a long dot duration, but very good for a novice telegraphist. Other characteristic times depend on the duration of the dot: a dash is assumed, it should last about three dot times, a pause between dashes and dots in the letter as much as a dot, and a pause between characters as many as a dash, i.e. three dots. The interval between words is the longest and should last seven times the period.
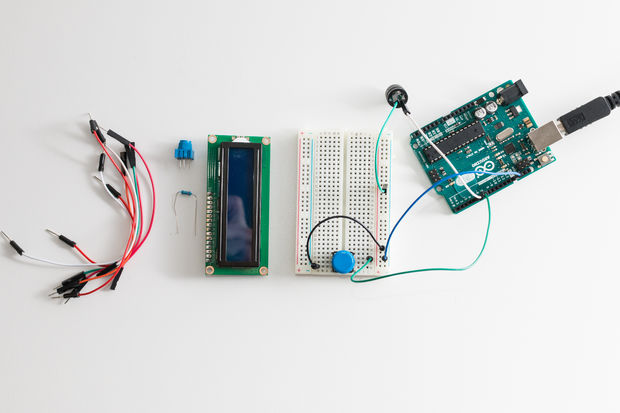
The following items will be needed to assemble the layout:
1 x Arduino Uno
1 x Contact plate
1 x 10 k? potentiometer
1 x PR button
1 x Speaker (Piezo Buzzer)
1 x LCD display (with Hitachi HD44780 compatible controller)
1 x 220 ? resistor
Jumper cables and connections for all components
Step 1: Connecting the elements The elements are connected together as shown in the above illustration.
Step 2: Program code and system operation First, we load the following sketch into Arduino:
In the program you can change the 'time base' by changing the value of the dotDuration variable. To make it easier for novice telegraphists, the system tolerates some time tolerances, but they can be changed in the program for smaller and smaller ones, as our skills improve. By default, the tolerance is set to 500 ms.
Happy telegraphing!
Source:
http://www.instructables.com/id/The-Morse-Translator-With-Arduino/




Comments
Will this system correctly read each transmission speed or do you need to set the speed for each message or sending? [Read more]
"const unsigned long dotDuration = 1000; // Dot duration in milliseconds" so the dot signal lasts 1s? In addition, it is a rather simple device for learning to broadcast Morse code. More interesting... [Read more]
Clinging article comes from instructables.com, I think this is the idea of this website - "Look, you don't need to have just an arduino (some other module) contact plate a few cables and a bit of ... [Read more]
I agree with "RaStro". On average, it works well with RX. An amplifier-detector would have to be added, e.g. on the LM567 in order to separate the "titawa" from the audio signal. I am preparing myself... [Read more]
Cool, if there was a good speed tolerance then you can listen to the melody of titawa transmission and read at the same time, sooner or later you may be able to understand with your eyes closed. I think... [Read more]
Either I don't fully understand the idea or she is sick about the speed. It should be automatic first, or adjustable ???? though what to do with decoding sender that broadcasts fully manually? Character... [Read more]