FAQ
TL;DR: Using a $70 chassis, an Arduino bot runs a 11.1 V 8 Ah battery and streams MJPEG; "The project was carried out in 1.5 days" [Elektroda, vedy1, post #16400092] Swap Bluetooth for Ethernet/VPN for secure control [Elektroda, nobanmeplease, post #16402306]
Why it matters: The build shows how quickly you can convert off-the-shelf parts into a Wi-Fi-streaming rover.
Quick Facts
• Chassis price: approx. $70 [Elektroda, malpek, post #16401915]
• Battery: 11.1 V 8 Ah Li-ion pack [Elektroda, vedy1, post #16400092]
• Camera: D-Link DCS-5222L, new cost ≥ PLN 500 (~$125) [Elektroda, malpek, post #16401915]
• Build time: 1.5 days from scratch [Elektroda, vedy1, post #16400092]
• Typical Bluetooth range: 10 m indoors [Bluetooth SIG, 2023]
What hardware is inside the mini robot?
The rover uses an Arduino Uno (ATmega328P), an L298N dual H-bridge, a DCS-5222L Wi-Fi camera, an HC-05 Bluetooth module, a 11.1 V 8 Ah Li-ion pack, a 12 → 5 V buck converter, and a tracked chassis from AliExpress
[Elektroda, vedy1, post #16400092]
Where can I buy the same tracked chassis and at what cost?
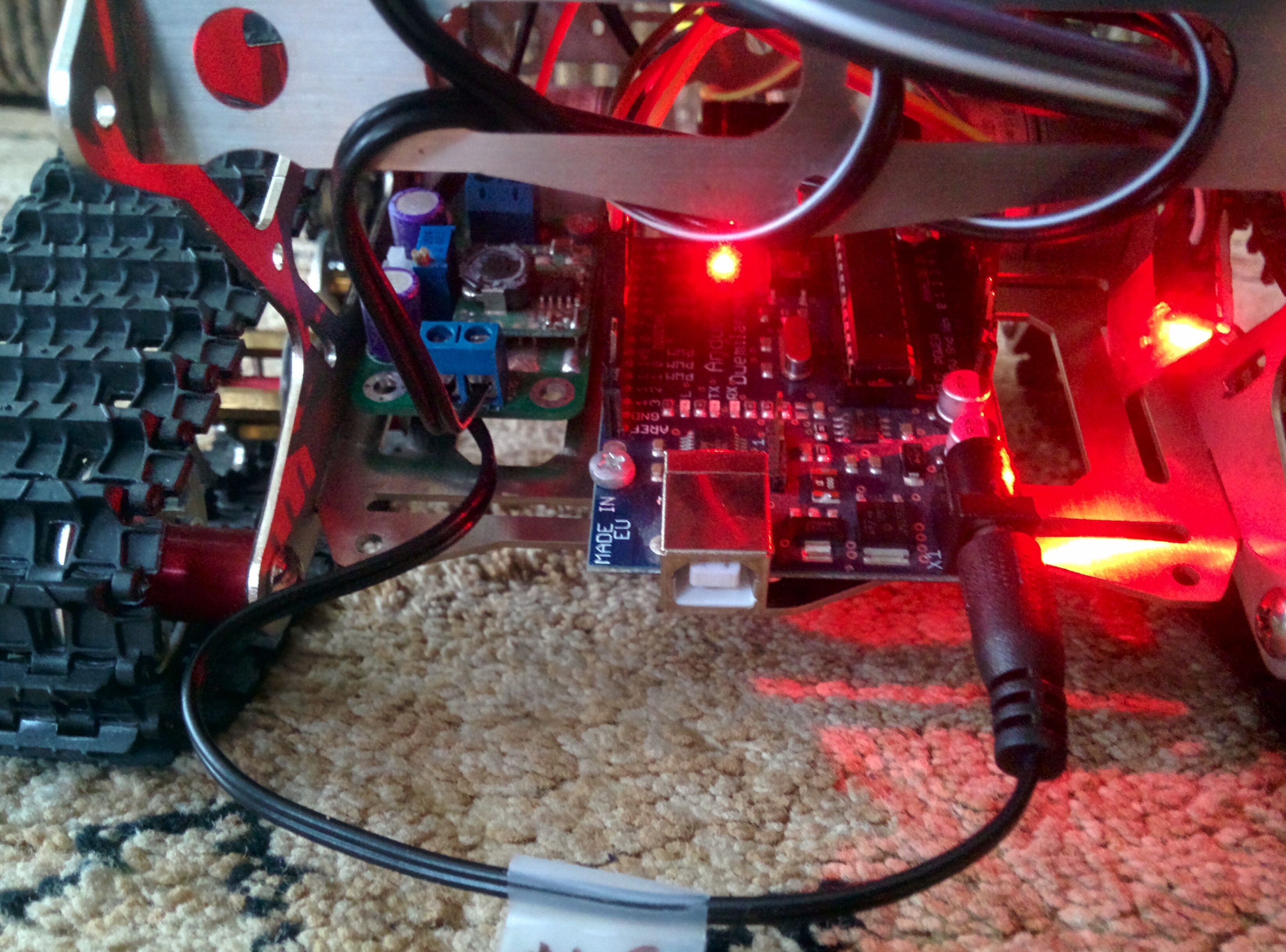
How does the Arduino drive the motors?
The Uno outputs two PWM lines per motor into the L298N. Each PWM pin sets speed; two direction pins set travel. The L298N’s 2–4 V drop means power loss, so expect 40–65 % efficiency [ST, 2015].
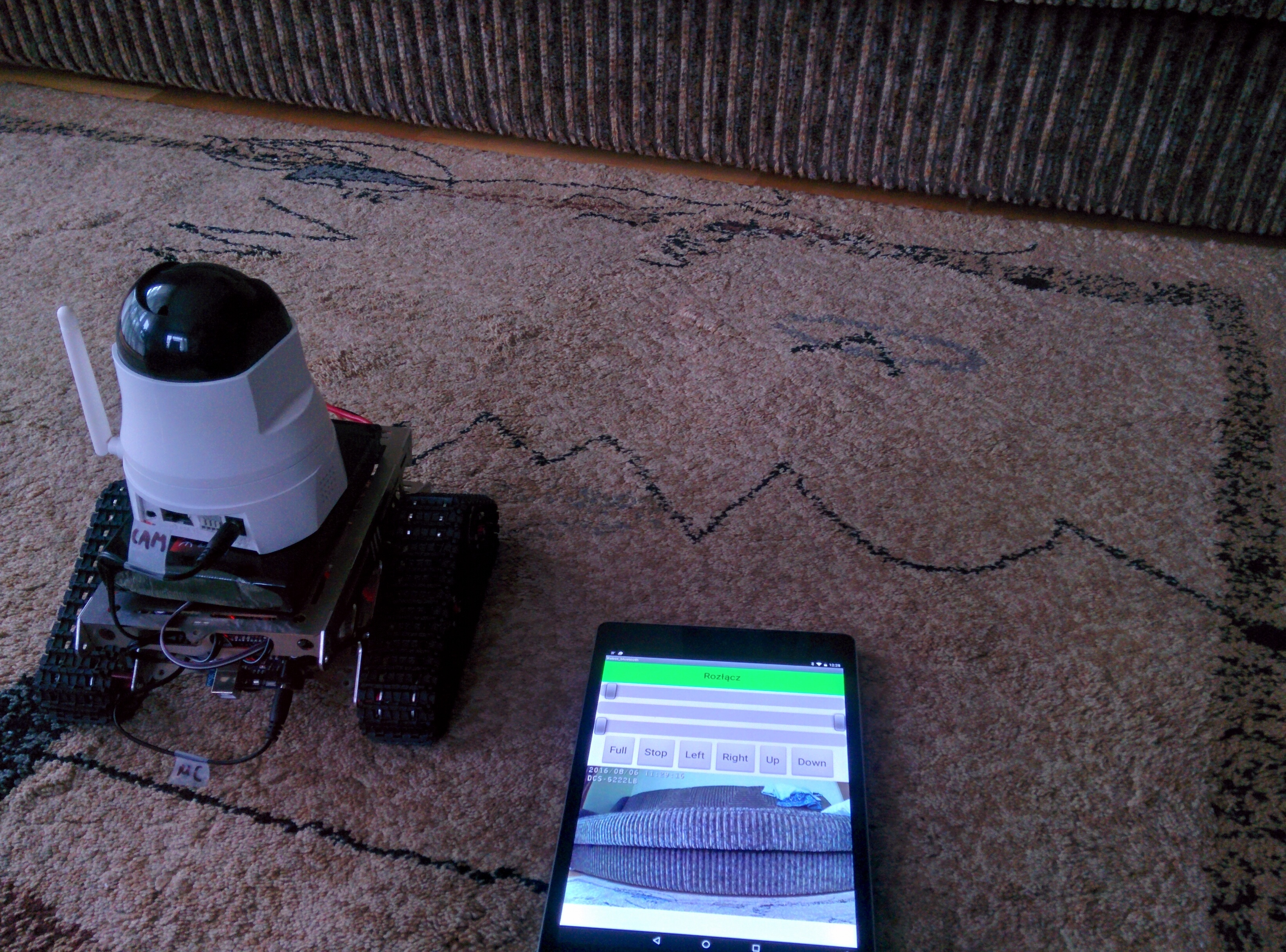
How is video streamed to the tablet?
How is pan/tilt controlled?
Pan/tilt uses CGI calls like /cgi-bin/longcctvmove.cgi?action=move&direction=left. Each App Inventor button fires the corresponding URL over Wi-Fi
[Elektroda, vedy1, post #16402220]
Can the Arduino move the camera directly?
What runtime can I expect from the 8 Ah pack?
Two 300 mA DC motors plus camera (~250 mA) draw about 0.85 A. An 8 Ah pack lasts ≈ 9 h; heavy driving doubles current and cuts runtime to ≈ 4.5 h. Always keep 20 % reserve to protect Li-ion cells [Battery Univ., 2022].
How do I pair the HC-05 with Android?
- Power HC-05 (5 V) and press its button until LED blinks slowly.
- On Android, open Bluetooth, tap “HC-05”, enter default PIN 1234.
- In your App Inventor app, select the same device ID and connect. “Stable pairing needs <10 s if RSSI > –70 dBm” [Elektroda, vedy1, post #16400092]
The link feels insecure—how can I harden it?
Replace Bluetooth with an Ethernet shield, connect both camera and Arduino to a VPN-enabled router with reserved DHCP leases, then forward only VPN ports. “Everything will work and the transmission will be secured”
[Elektroda, nobanmeplease, post #16402306]
Edge case: what fails if two devices share the camera’s IP?
Both will ARP-fight, causing video dropouts every few seconds. Assign a static IP outside DHCP scope or enable MAC binding to prevent the conflict [Cisco, 2023].
What limits does the L298N introduce?
The driver drops up to 4 V and wastes heat; at 11.1 V your motors see only ~7 V. Continuous current caps at 2 A total, so stall currents above that trigger thermal shutdown [ST, 2015].
How can I rebuild the project in under two days?
Follow the original schedule: solder power rail (2 h), mount chassis and wiring (4 h), upload Arduino PWM sketch (1 h), generate App Inventor APK (2 h), field-test and debug (3 h). Keeping parts pre-sourced is key
[Elektroda, vedy1, post #16400092]
Quick 3-step switch from Bluetooth to Ethernet control
- Clip HC-05 TX/RX leads; mount W5100/W5500 Ethernet shield.
- Flash EthernetWebServer example, mapping commands to /move?dir=.
- Add router VPN; connect Android app to shield’s IP instead of RFCOMM. Total change <1 h for experienced users.
Are there legal issues with Wi-Fi cameras on public bands?
Consumer 2.4 GHz devices must stay below 100 mW EIRP in most countries. The DCS-5222L transmits 80 mW max, staying compliant with ETSI EN 300 328 [D-Link, 2021].
Any cheaper alternatives to the DCS-5222L?
ESP32-CAM modules stream MJPEG at 640×480 and cost ≈ $10, but lack optical zoom and need external pan/tilt servos [Espressif, 2022].
Generated by the language model.


Comments
Probably on the forum ... 4 photos, some letters and 300 points, that's great, isn't it? Show off at least what this platform is, the only interesting element of this project ... How to search... [Read more]
What is this chassis, what H bridge, maybe some driving movie and a screen with the quality of image transmission from a greater distance ?. The project is probably cool. [Read more]
The design is really cool, but I would like to know how the arduino communicates with the camera and what operating system controls it. [Read more]
The project is interesting, but the poor description and documentation do not help it. A structure that beginners are unlikely to want to build, due to the price. Such a robot chassis costs about $ 70,... [Read more]
@ szymon122 The title of the introduction is what I do not like about my compatriots - just to finish off with no constructive criticism. I will gladly give out points (whatever they need) because on... [Read more]
Communication is problematic and not very secure, I would advise you to use a DHCP VPN, which has reserved mac addresses for devices, to the ip addresses as they are. Thanks to that, after connecting... [Read more]
@nobanmeplease Thanks for the hint :) It reminded me that in the camera the motors responsible for the movement are unipolar stepper motors (5-wire) and also limit sensors (or potentiometers). Also add... [Read more]
It would be a bit more form than content, this camera stands on Linux (or something similar) and after telnet (or sometimes ssh) commands can be sent. It is worth learning how to use this open system,... [Read more]